 |
楊仕謙 |
TEL: (C) +1 408-590-4674(US) TEL: (C) +886 922-113-493(TW) |
|
Email: shihchieny@gmail.com |
|

|
|
|
|
 |
|||
|
設備能力工程師
ASML Sep. 2022 - Present |
客戶支援工程師
ASML Apr. 2021 - Aug. 2022 |
國衛院 |
昕奇雲端 |
艾沙技術 |
專利局 專利工程師 Oct. 2013 - Aug. 2016 |
淡江大學 機械與機電工程學系 Sep. 2011 - Aug. 2013 |
軟體及機電整合工程師,畢業於淡江大學機械與機電工程碩士,主要研究於電腦視覺中使用RGB-D攝影機實現同步定位與建圖;在工作經驗中,使用Python、C++/C和C#開發軟體及自動化系統,平台有個人電腦及嵌入式系統,系統大多為Windows及Ubuntu;專案項目大部分使用RGB、TOF和雙眼攝影機檢測或是辨識物體,進而開發及整合軟體,其中有人臉辨識解決方案、熱監控及健康監控等軟體。
工作經歷
|
|
|
|
|
|
|
|
|
|
|
|
|
期刊
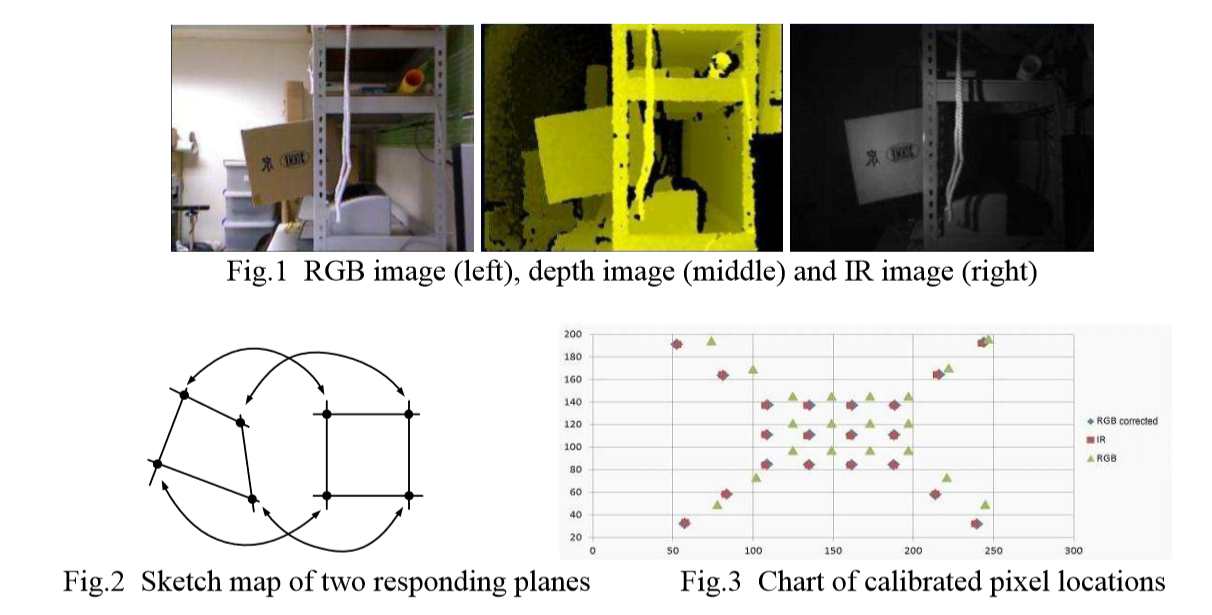
本文介紹了Kinect RGB-D感測器的校準程序及其在機器人同時定位與建圖(SLAM)中的應用。 校準過程包括兩個階段:在第一階段,通過使用雙線性插值將RGB圖像與深度圖像對齊。 在第二階段中,失真的RGB圖像被進一步校正。 校準後的RGB-D感測器運用在未知環境下機器人導航的感測設備。 在SLAM任務中,從RGB圖像中偵測出加速穩健特徵(SURF),並將其用作環境圖的地標。 深度圖像可以提供每個地標的深度資訊。 同時,機器人通過擴展的卡爾曼濾波器(EKF)估測自身的狀態和地標位置。 本文已經進行了EKF SLAM,實驗結果顯示,Kinect感測器在未知環境中導航時可以給移動機器人提供可靠的測量訊息。
論文
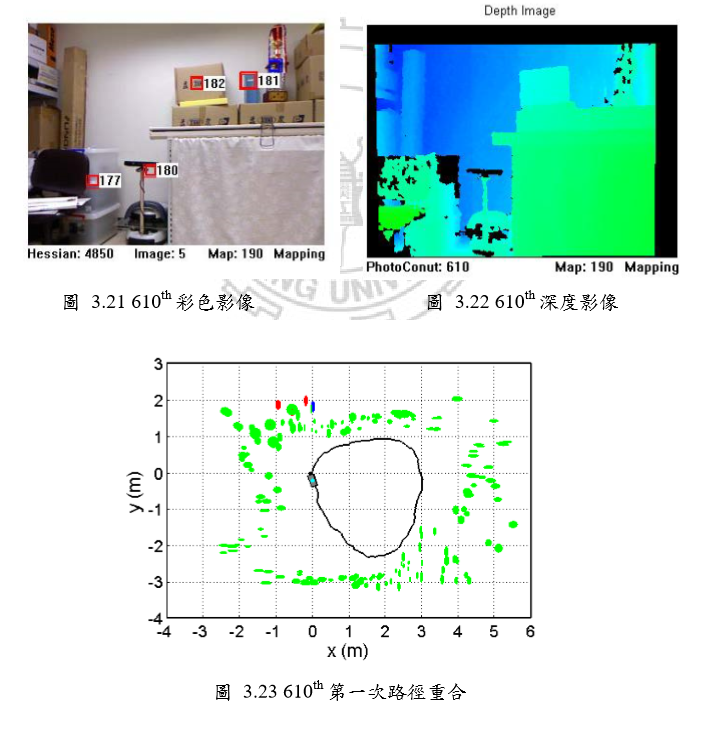
本論文使用微軟Kinect之RGB-D感測器,發展機器人同時定位與建圖演算法。研究分為四個階段:第一階段校準Kinect RGB-D感測器,包括RGB攝影機的內部參數校準,以及RGB鏡頭與深度鏡頭的歪斜校準。基於RGB-D感測器的同時定位與建圖之演算法在第二階段被建立與實測。第三階段將移動中建立場景的功能整合到同時定位與建圖任務中,以便建立環境模型。第四階段規劃系統的運算速度之改善程序。利用雲端運算的概念,將運算系統分為影像處理與狀態估測兩個運算程序。將影像處理程序保留在移動感測系統端,而狀態估測程序交由雲端運算伺服器進行處理。實測結果顯示使用本論文規劃的雲端運算程序,可以加快15%的運算速度。