 |
Shih-Chien Yang (Ben Yang) |
|
TEL: (C) +1 408-590-4674(US)
TEL: (C) +886 922-113-493(TW) |
|
|
Email: shihchieny@gmail.com
|
|
|
|

|
|
|
|
|
|
|
 |
|
Competency Engineer
ASML Sep. 2022 - Present |
Customer Support Engineer
ASML Apr. 2021 - Aug. 2022 |
Project Research Assistant
NHRI Mar. 2020 - Dec. 2020 |
Software Engineer |
Algorithm Engineer
iSSA Sep. 2018 - Jun. 2019 |
Patent Assistant
TIPO Oct. 2013 - Aug. 2016 |
M.E. in Mechanical Engineer
Tamkang University Sep. 2011 - Aug. 2013 |
Bio. I am a software and mechanical engineer with an M.E. in Mechanical and Electro-Mechanical Engineering who has used the Kinect Sensor system for Simultaneous Localization and Mapping (SLAM). At work experience, using many programming languages which is python、C++/C and C# to develop software and automated system on PC or embedded system which like TX2、IPC and Raspberry Pi with operation system which are Ubuntu and Windows. In project, using machine learning like tensorflow and pytorch and cameras which are RGB、TOF and stereo to detect and recognize object and develop and integrate software such as face recognition solution、Thermal monitor and health monitor etc. In data analysis, using PowerBI, Spotfire develop front-end UI for user and using python develop back-end for data processing
Work Experience
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Publication
Applied Mechanics and Materials Vols. 479-480 (2014) pp 677-681
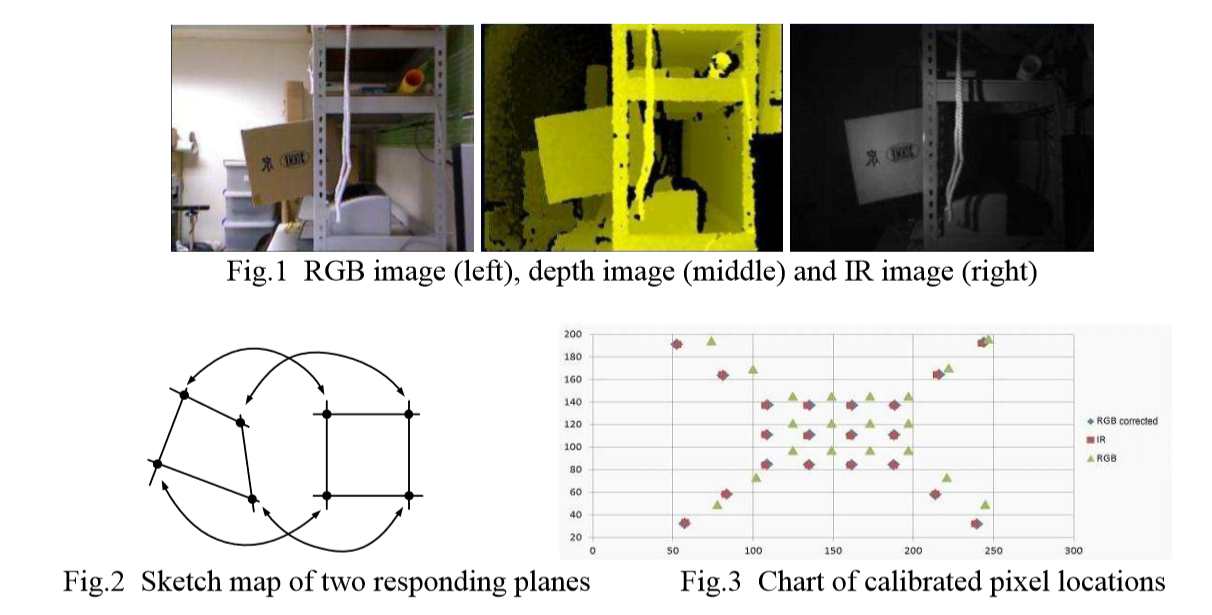
This paper presents a calibration procedure for a Kinect RGB-D sensor and its application to robot simultaneous localization and mapping (SLAM). The calibration procedure consists of two stages: in the first stage, the RGB image is aligned with the depth image by using the bilinear interpolation. The distorted RGB image is further corrected in the second stage. The calibrated RGB-D sensor is used as the sensing device for robot navigation in unknown environment. In SLAM tasks, the speeded-up robust features (SURF) are detected from the RGB image and used as landmarks for the environment map. The depth image could provide the stereo information of each landmark. Meanwhile, the robot estimates its own state and landmark locations by mean of the extended Kalman filter (EKF). The EKF SLAM has been carried out in the paper and the experimental results showed that the Kinect sensors could provide reliable measurement information for mobile robots when navigating in unknown environment.
Thesis
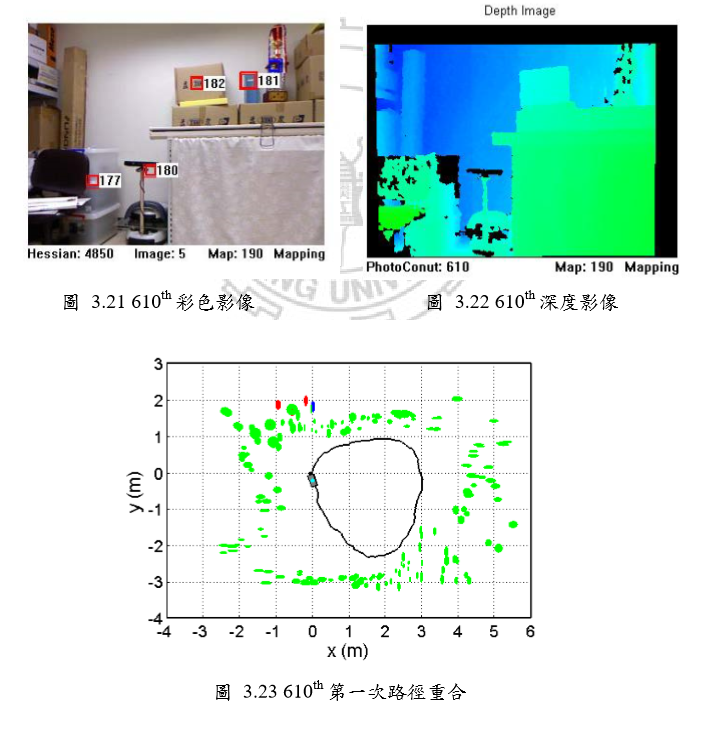
This thesis presents an algorithm of robot simultaneous localization and mapping (SLAM) using a RGB-D sensor. This research consists of four stages: first, the Kinect RGB-D sensor is calibrated including the intrinsic parameters of RGB camera as well as the alignment of the RGB sensor and the depth sensor. The RGB-D SLAM is developed and implemented in indoor environments at the second stage. Third, the task of structure from motion (SFM) is integrated with the RGB-D SLAM to construct the environment model. Computational speed is improved at the last stage. The concept cloud computing is applied to the SLAM system by dividing the system into two procedures including image processing and state estimation. The procedure of image processing is remained at the mobile sensory system, while the state estimation is implemented by a cloud computing server. Experimental results show that the computational speed is increased 15% with the cloud computing.